NEWS
Sep, 2025
Let's meet at Niedersachsen Aviation Day
- Thursday, 25.09.2025
- Object tracking demo
- Driving surface condition estimation demo (cf. RoadSaW)

Object Tracking
Sep, 2025
Presentation at DAGM German Conference on Pattern Recognition (GCPR) 2025
- Universität Freiburg, KG 1, Poster Session 1, 24.09.2025, 16:00
- Lin Chen et. al: "EVCS: A Benchmark for Fine-Grained Electric Vehicle Charging Station Detection
- EVCS Dataset: https://evcs.viscoda.com
- Demonstration Video [YouTube]

Object Detection
Sep, 2025
Let's meet at AI Solution Days
- Tuesday, 16.09.2025
- Booth together with SSV Software Systems
- VISCODA object tracking demo

Sep, 2025
Presentation at: Tech Meetup: Green AI – mit KI Kosten sparen und das Klima schützen
10.09.2025, 16:30: "Ressourcenoptimierte KI für maschinelles Sehen"

Aug, 2025
New research project:
"Benutzerfreundliche 3D Gebäuderekonstruktion zur Bestandsaufnahme mittels Kamera"
- Fördermaßnahme: Anwendungsorientierte nichtnukleare FuE im 8. Energieforschungsprogramm der Bundesregierung im Bereich Gebäude
- 01.09.2025 - 31.05.2026


Building Reconstruction
July, 2025
Paper accepted at DAGM German Conference on Pattern Recognition (GCPR) 2025
- Lin Chen, Sönke Südbeck, Christoph Riggers, Tobias Geib, Kai Cordes, and Hellward Broszio:
"EVCS: A Benchmark for Fine-Grained Electric Vehicle Charging Station Detection" - VISCODA Research Project: GreenAutoML4FAS with our Partners AI (Institut für Künstliche Intelligenz), TNT (Institut für Informationsverarbeitung), and IMS (Institut für Mikroelektronische Systeme)
- EVCS Dataset: https://evcs.viscoda.com

Object Detection
Apr, 2025
Talk on Hannover Messe - Transformationsnetzwerk neu/wagen
H. Broszio: "Ressourcenoptimierte KI für maschinelles Sehen", Di. 01.04. 14:00
- Niedersachsen Gemeinschaftsstand „Digitalisierung“, Halle 16, Stand F11
Mar, 2025
Workshop contribution published:
K. Cordes, L. Chen, S. Südbeck, and H. Broszio: "Online Optimization of Stereo Camera Calibration Accuracy", 3D in Science & Applications (3D-iSA), 978-3-942709-34-7, p. 75-78
Feb, 2025
Paper publication:
J. Jia, J. Kang, L. Chen, X. Gao, B. Zhang, G. Yang: "A Comprehensive Evaluation of Monocular Depth Estimation Methods in Low-Altitude Forest Environment", Remote Sensing, 17(4), 717
Jan, 2025
Research project proposal accepted
FuE-Vorhaben (Forschungszulage)
- "Automatisierte Erstellung des Digitalen Zwillings von Gebäuden aus einer Punktwolke"
- funded by BMBF: Bundesministerium für Bildung und Forschung

Dec, 2024
Research project proposal accepted
FuE-Vorhaben (Forschungszulage)
- "Bestimmung und Verbesserung der Kalibriergenauigkeit von Stereokameras im Einsatz"
- funded by BMBF: Bundesministerium für Bildung und Forschung

Dec, 2024
Demonstration video published
Automated Building Information Modeling (BIM) from Camera Images
")
Building Information Modeling (BIM)
Nov, 2024
Presentation at Workshop 3D-iSA (3D-NordOst)
26. Anwendungsbezogener Workshop zur Erfassung, Modellierung, Verarbeitung und Auswertung von 3D-Daten 26.11./27.11.2024 in Berlin-Adlershof
- Title: "Online Optimization of Stereo Camera Calibration Accuracy"
Nov, 2024
Demonstration video published
Annotation Demo: Application Example - EVCS

Dataset Construction
Nov, 2024
Demonstration video published
Real-time monocular 3D reconstruction for autonomous navigation

Real-time Visual SLAM
Sep, 2024
Paper presentation
Presentation at ECCV 2024 - 2nd Workshop on Vision-Centric Autonomous Driving (VCAD)
High-impact stereo datasets have systematic errors!
30-09-2024 from 8:00am to 1:00pm at MiCo Milano
- Workshop on Vision-Centric Autonomous Driving
- K. Cordes, H. Broszio: "Accuracy Evaluation and Improvement of the Calibration of Stereo Vision Datasets", ECCV - VCAD workshop, 2024, pdf
- Results Demonstration [YouTube]
- Poster [pdf]

Presented at ECCV

Vertical disparities dy for a rectified stereo image with suboptimal camera calibration
Aug, 2024
Paper publication:
J Kang, L Chen, C Heipke: "EnhancedNet, an End-to-End Network for Dense Disparity Estimation and its Application to Aerial Images" PFG–Journal of Photogrammetry, Remote Sensing and Geoinformation Science, Springer 2024
Jun, 2024
Paper presentation:
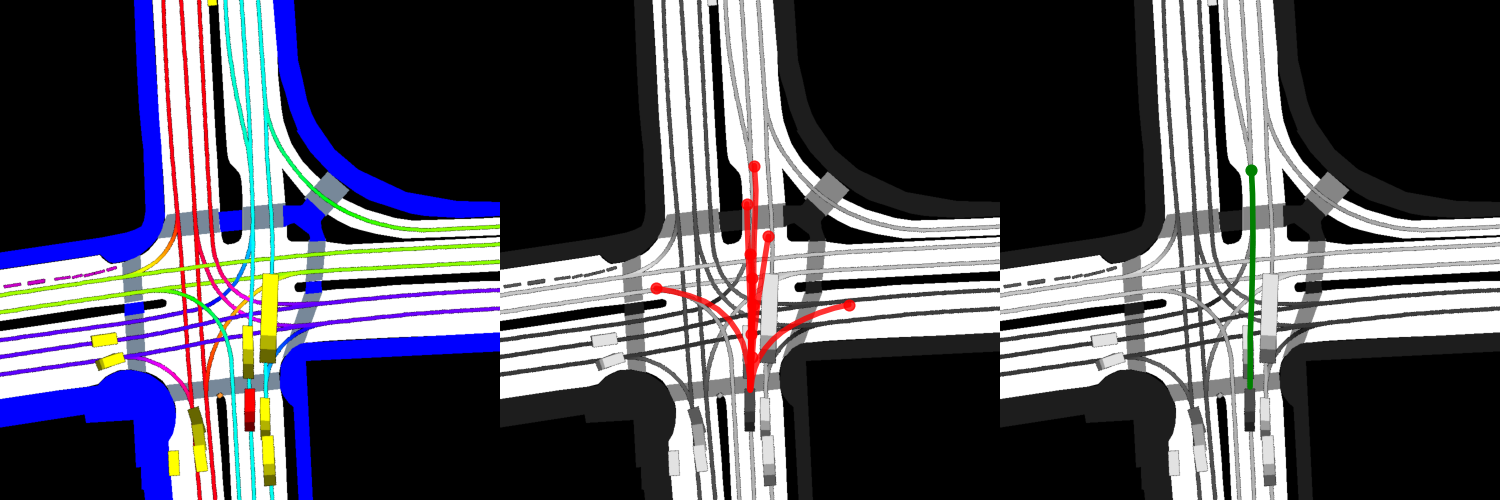
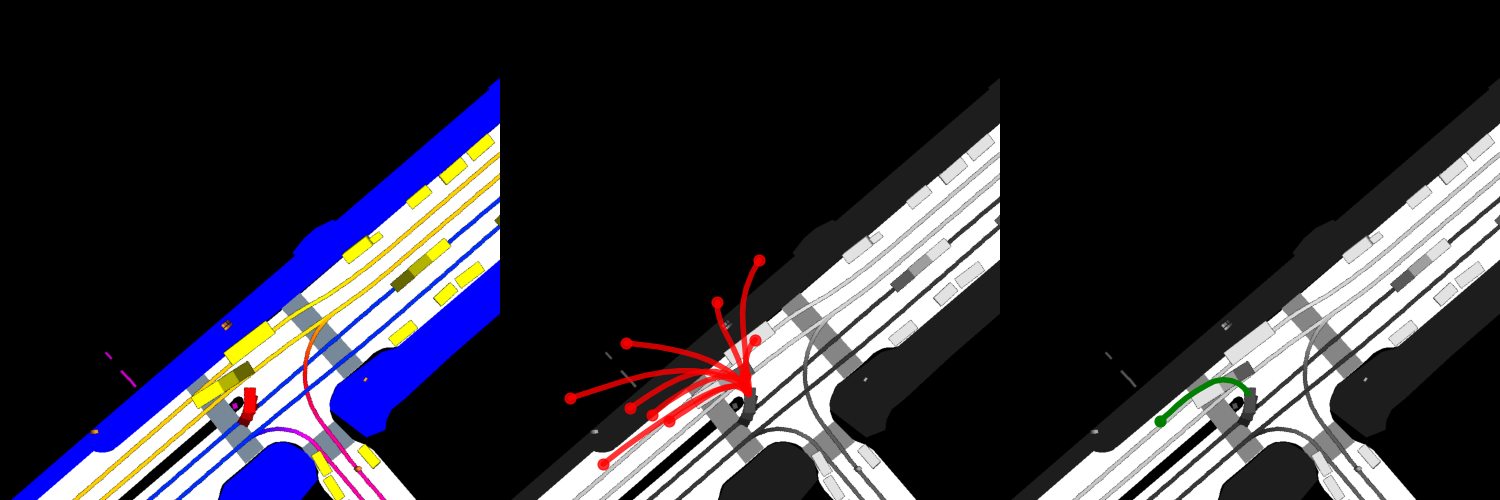
"LAformer: Trajectory Prediction for Autonomous Driving with Lane-Aware Scene Constraints" presented at CVPR workshop

Trajectory Prediction
Mar, 2024
We're Partner of KIWI
- AI online platform for small and medium-sized companies
- www.kiwihannover.de
Jan, 2024
InFusion Demo
- 16.01.24, 10h – 16h
- Erich-Reinecke-Testbahn Contistraße 1, 29323 Wietze
Nov, 2023
Paper publication
- ISPRS Journal of Photogrammetry and Remote Sensing, Volume 205, Nov 2023, Pages 163-175
- https://doi.org/10.1016/j.isprsjprs.2023.10.001
Okt, 2023
Paper presentation
03-10-2023, Poster Session #1: 10:30 - 11:15 @room E05
- K. Cordes, H. Broszio: "Camera-Based Road Snow Coverage Estimation", ICCVw, 2023
- RoadSC dataset
- Poster [pdf]
- Paper at CVF


Road Condition Estimation
Aug, 2023
Paper accepted at ICCV Workshop BRAVO: roBustness and Reliability of Autonomous Vehicles in the Open-world
- K. Cordes, H. Broszio: "Camera-Based Road Snow Coverage Estimation", ICCV BRAVO Workshop, Okt. 2023

Road Condition Estimation
Jul, 2023
New Research Project
DIGI-PV
"Digitale Planung und automatisierte Produktion von Gebäude-integrierter Photovoltaik"
- 01.07.2023 - 30.06.2026
- Teilvorhaben: Erfassung, Digitalisierung, Klassifizierung und Strukturierung von Gebäudeoberflächen
Jun, 2023
VISCODA successfully passed TISAX certification
- TISAX® Scope-ID S1L4TX
- ACAR – TISAX Specification of Assessment Version 2.1
Mar, 2023
New Research Project:
GreenAutoML4FAS
"Automatisiertes Green-ML anhand des Anwendungsbeispiels Fahrerassistenzsysteme" -
"Automated Green-ML with Application to Driver Assistance Systems"
- 01.03.2023 - 28.02.2026
- VISCODA develops use cases in cooperation with AI (Institut für Künstliche Intelligenz), TNT (Institut für Informationsverarbeitung) , and IMS (Institut für Mikroelektronische Systeme).
- Strong focus on energy-efficient ML for automated driving
- Funded by BMUV

Application: Object Detection
Jan, 2023
IWAn Demonstration Video Published

Dataset Construction
Paper preprint:
"GATraj: A Graph- and Attention-based Multi-Agent Trajectory Prediction Model"
- Cooperated with researchers from Leibniz University Hannover and University of Twente
- Deliver high quality near-realtime trajectory prediction for traffic participants
- Paper is accessible here: https://arxiv.org/abs/2209.07857
Sep, 2022
Paper Presentation at IEEE ITSC 2022:
"Micro Maneuvers: Obstacle Detection for Standing Vehicles using Monocular Camera"
- Session: Sensing, Vision, and Perception-6
- 2022/09/26 15:30 PM (German Time)
2022/09/26 09:30 PM (Beijing time, UTC/GMT+08:00) - https://meeting.tencent.com/dm/jZg6LHlEbL3V (Online Meeting Room ID:486-660-209)
- Micro Maneuvers Demonstration Video [YouTube]

Jun, 2022
Paper accepted at
the 25th IEEE International Conference on Intelligent Transportation Systems
- K. Cordes, H. Broszio: "Micro Maneuvers: Obstacle Detection for Standing Vehicles using Monocular Camera", ITSC, 2022
- Demonstration Video [YouTube]

Jun, 2022
Paper Presentation
Presentation at CVPR 2022: Workshop on Autonomous Driving
"RoadSaW: A Large-Scale Dataset for Camera-Based Road Surface and Wetness Estimation"
-
06-20-2022: Spotlight/Poster Presentation
- Paper at Computer Vision Foundation (CVF)

Apr, 2022
KI Themenwoche 27.04.2022
KI related research topics are presented at L3S of the Leibniz Universität Hannover, organized by L3S.
VISCODA demonstrates Kamerabasierte Schätzung des Fahrbahnzustandes (InFusion project) and Kamerabasierte Bewegungsanalyse aller Verkehrsteilnehmer (KaBa project). Both projects target the use case automated driving.
Poster
Apr, 2022
Paper accepted at CVPR Workshop on Autonomous Driving
- K. Cordes, C. Reinders, P. Hindricks, J. Lammers, B. Rosenhahn, H. Broszio: "RoadSaW: A Large-Scale Dataset for Camera-Based Road Surface and Wetness Estimation", CVPR Workshop on Autonomous Driving, 2022

Feb, 2022
Ident demonstration video published
Nov, 2021
Invited Talk at IPI (Graduiertenkolleg i.c.sens)
Nov, 2021
VISCODA GmbH nominated for ZF Supplier Innovation Award
Sep, 2021
IdenT Meeting Organized in Hannover
Together with the Institute of Mechatronic System (imes), VISCODA hosts the 4th IdenT project meeting (Konsortialtreffen) in Hannover for our IdenT collaborators from BPW, Fraunhofer LBF, Fraunhofer ITWM, Industrial Science, and OKIT.May, 2021
New Research Project:
"Kamerabasierte Bewegungsanalyse aller Verkehrsteilnehmer für automatisiertes Fahren"
- 01.05.2021 - 31.06.2022
- VISCODA develops machine learning based semantic segmentation in cooperation with the Institut für Informationsveratbeitung (TNT), the Home of Machine Learning at LUH
- The targeted applications have a strong focus on automated driving
April, 2021
Book published:
- "Cellular V2X for Connected Automated Driving", © 2021 John Wiley & Sons, Ltd
- VISCODA provided the editing and co-authoring of the chapter
K Cordes, H Broszio, H Wymeersch, S Saur, F Wen, Nil Garcia, Hyowon Kim,
Cellular V2X for Connected Automated Driving, 2021
Jan, 2021
Paper presentation: "Vehicle Lane Merge Visual Benchmark"
- 14. January 2021 @ 12h-13h CET
- At IEEE International Conference on Pattern Recognition (ICPR)
- Track 1: Artificial Intelligence, Machine Learning for Pattern Analysis,
Session PS T1.9 - Supplementary video:
https://youtu.be/tiPABhZoFEw - Poster
- Benchmark

Jan, 2021
New Research Project:
"Entwicklung interaktiver Werkzeuge zur automatisierten 2D/3D-Annotation"
- 01.01.2021 - 31.12.2022
- VISCODA develops automatic and semi-automatic methods for the generation of large scale data sets targeting machine learning in the fields computer vision and automated driving
Nov, 2020
Test data aquisition on ZF test track in Jeversen [InFusion project]
Large scale data recording using stereo cameras for the vision-based estimation of the road condition on trucks and cars. The test track provides various road surfaces and simulated weather conditions.

Oct, 2020
Vehicle Lane Merge Visual Benchmark
Paper accepted at: IEEE International Conference on Pattern Recognition (ICPR)-
K. Cordes and H. Broszio: "Vehicle Lane Merge Visual Benchmark",
International Conference on Pattern Recognition (ICPR), IEEE, Jan. 2021

June, 2020
Research Project KickOff - InFusion: Cloud-Anwendung für zeitlich veränderliche Fahrbahnzustandsinformationen für verschiedene Fahrzeugklassen basierend auf fusionierten Fahrzeugdaten von Fahrzeugen verschiedener Klassen (LKW/PKW)
VISCODA develops the detection, localization, and classification of road conditions in real-time from the in-vehicle front camera. The results are fused with information from other sensors (such as vibroacoustic, meteorologic, or traction control responses) for the estimation of vehicle specific road friction. A cloud based service increases traffic safety and efficiency for driving assistance and automated driving applications.
The research project is supported by the Bundesministerium für Verkehr und digitale Infrastruktur.
Feb, 2020
Research Project KickOff - IdenT: Identifikation dynamik- und sicherheitsrelevanter Trailerzustände für automatisiert fahrende Lastkraftwagen
The research project is supported by the Bundesministerium für Wirtschaft und Energie.
Dec, 2019
Presentation at 55. Working Group of Initiative Bildverarbeitung e. V. at TNT
Hellward Broszio gives an overview of the activities of the VISCODA GmbH at the 55. working group (55. Arbeitskreis) of the Initiative Bildverarbeitung e. V. ("Inititative Image Processing, registered association").
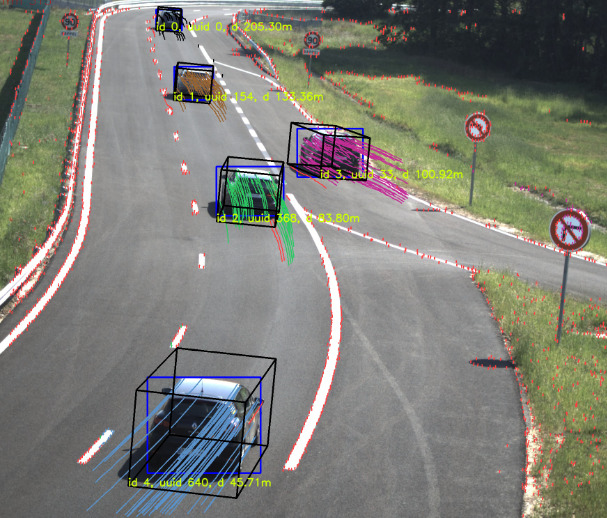
Nov, 2019
Presentation at ICCVE 2019 Conference
"Accuracy Evaluation of Camera-based Vehicle Localization" paper:
VISCODA presents the developed multiple object tracker together with an evaluation of its accuracy for vehicles observed by a multi camera system at ICCVE 2019 (International Conference on Connected Vehicles and Expo).
Sep, 2019
5GCAR Report 'The 5GCAR Demonstrations'
5GCAR report 'The 5GCAR Demonstrations' publicly available.
The report includes the use cases Lane Merge Coordination, See-Through Sensor Sharing, Long Range Sensor Sharing, and Vulnerable Road User Protection as shown in the Final Demonstrations at the UTAC CERAM TEQMO test track in Linas near Paris.
Aug, 2019
Paper accepted at: IEEE International Conference on Connected Vehicles and Expo (ICCVE), Nov. 2019
K. Cordes, N. Nolte, N. Meine, and H. Broszio: "Accuracy Evaluation of Camera-based Vehicle Localization"

June, 2019
5GCAR Demonstrations
Final demonstrations of all use cases developed in Work Package 5 of 5GCAR at the UTAC CERAM TEQMO test track in Linas near Paris

Apr, 2019
EuCNC 2019 Conference
"Use Case Representations of Connected and Automated Driving" showcasing the use cases of the 5GCAR project accepted for poster presentation at EuCNC 2019
Feb, 2019
5GCAR Integration Tests at UTAC
Integration tests including the Lane Merge Coordination demonstration at the UTAC CERAM TEQMO test track in Linas near Paris:
Feb, 2019
MWC 2019
5GCAR will participate in Mobile World Concgress 2019 at the Mobile World Capital stand in Congress Square (CS-40) in Barcelona, February 25-28, 2019.
Dec, 2018
VISAPP 2019 Conference
Multi Camera Calibration paper accepted:
In "Constrained Multi Camera Calibration for Lane Merge Observation",
we demonstrate our calibration procedure targeting the highly accurate localization of vehicles in the lane merge scenario (H2020: 5GCAR Project).
- K. Cordes and H. Broszio: "Constrained Multi Camera Calibration for Lane Merge Observation", International Conference on Computer Vision Theory and Applications (VISAPP), Feb. 2019
- Paper preprint (pdf)

R&D
VISCODA is developing in a funded cooperation project an innovative application for 3D reconstruction of the vehicle environment using monocular cameras.
VISCODA enwickelt in einem geförderten Kooperationsprojekt ein innovatives Verfahren für die 3D Rekonstruktion des Fahrzeugumfeldes mit monokularen Kameras.
- See related: Research at VISCODA


5GCAR Report 'Demonstration Guidelines'
5GCAR report 'Demonstration Guidelines' publicly available.
It includes our demo scenario in which cars are detected, accurately localized, and tracked using a surveillance camera system.
This data is used for the orchestration of the lane merge (e.g. incoming car merges into the traffic on a highway)
Zukunftstag
VISCODA supports "Zukunftstag für Mädchen und Jungen".
See related:
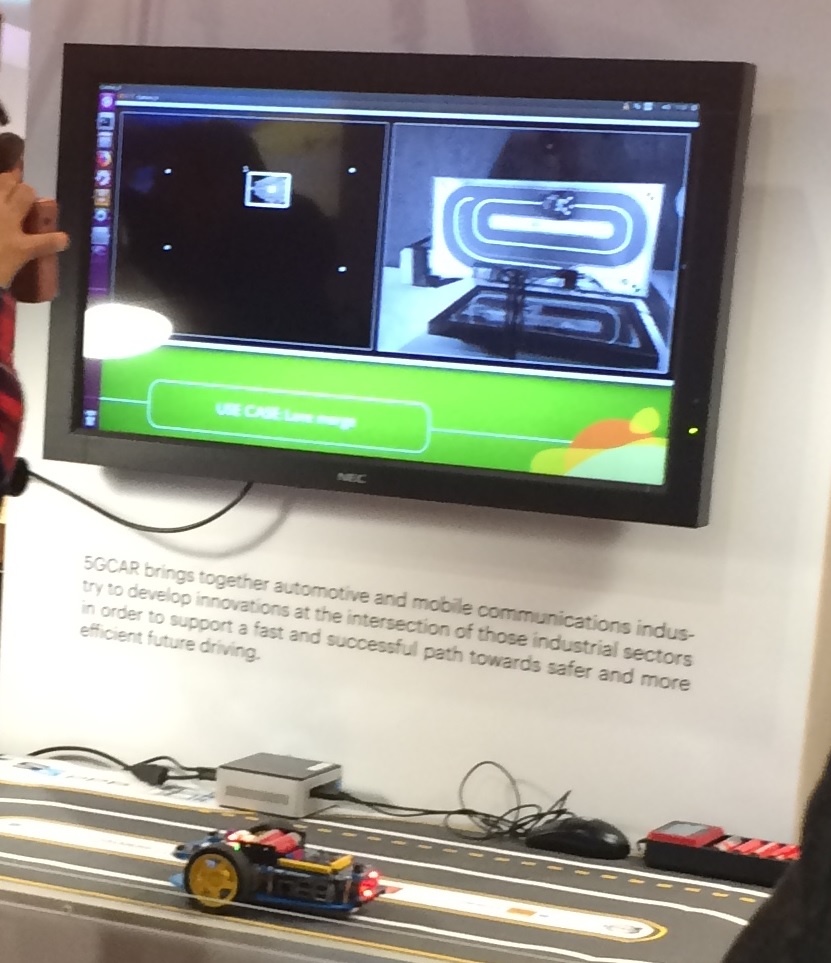
MWC 2018 Demonstration
VISCODA demonstrates video-based tracking of vehicles on MWC 2018 (Barcelona), together with our 5GCAR project partners CTTC, Ericsson, Huawei, and KCL.See related:

Aug, 22-24, 2017
CAIP 2017 Conference
Paper presentation at CAIP 2017 conference in research area: Motion Segmentation using Hypergraphs
5GCAR
VISCODA develops 5G-based connected car Technologies as a member of the EU-funded 5GCAR consortium led by Ericsson
See related:
- https://5g-ppp.eu/5gcar/
- Ericsson Leads European 5GCAR Project (Ericsson press release)