
")

Vehicle Lane Merge Visual Dataset
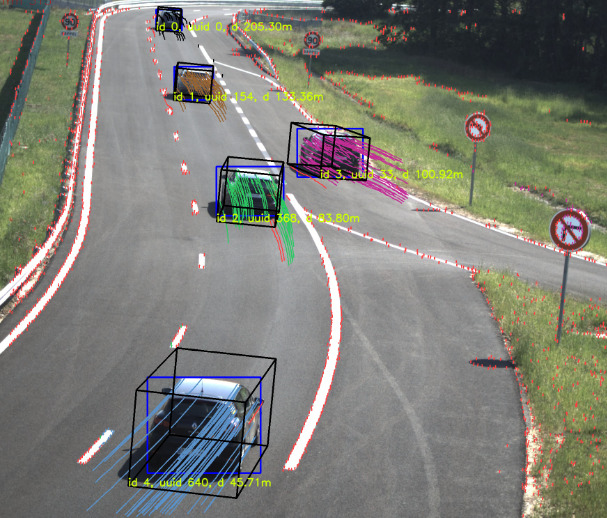
Dataset: Lane Merge Maneuver of Vehicles
Objective 1: Evaluation of vehicle localization techniques
- Use video data for 3D vehicle localization, GNSS-RTK for evaluation [1]
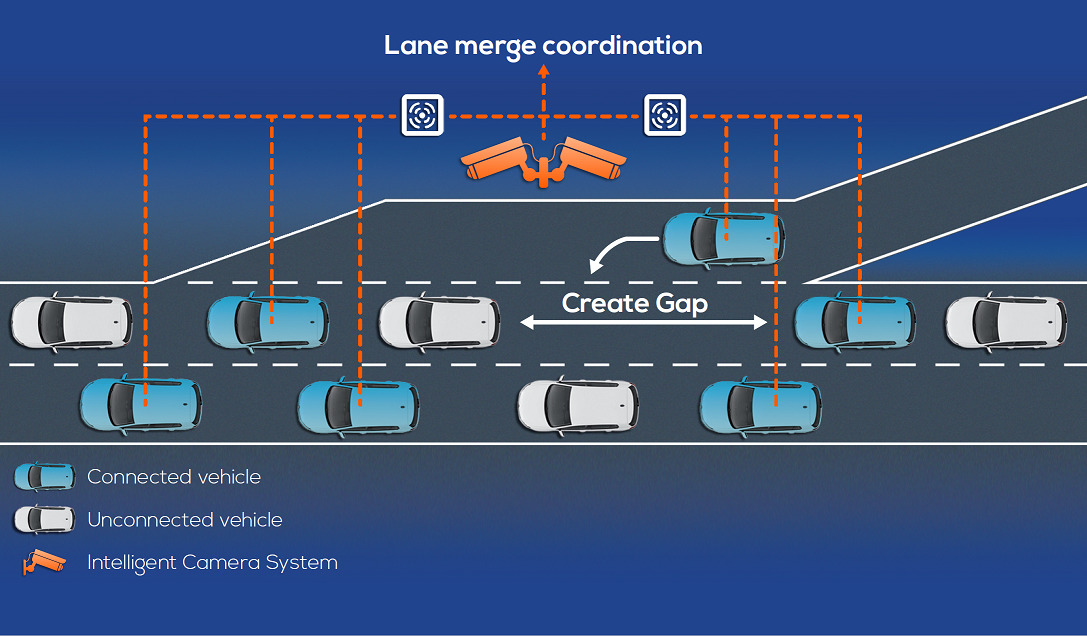
Objective 2: Learning of lane merge coordination
- Use GNSS-RTK and vision-based vehicle positions for learning cooperative maneuvers [3]
Data Set:
- 85 lane merges performed by human drivers on 7 recording days
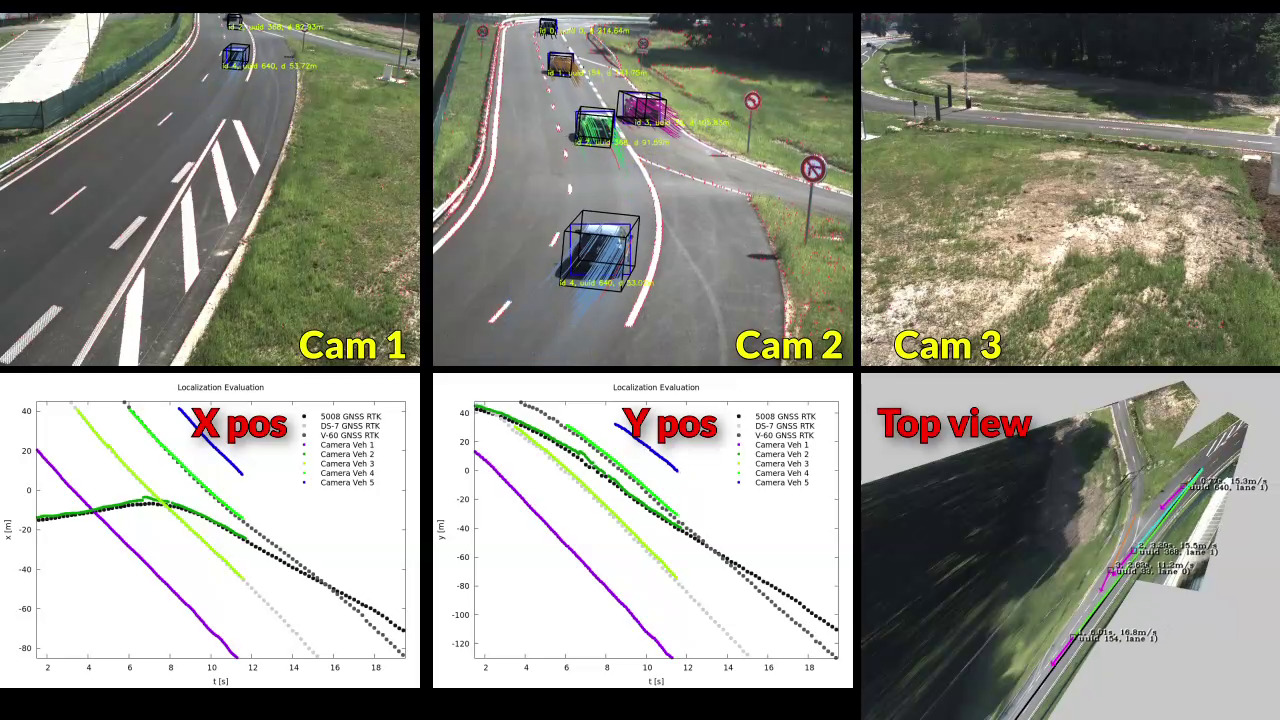
- Temporally synchronized multi-view video streams (four cameras)
- Accurate camera calibration [1,5]
- Vehicle positions:
- GNSS-RTK (see D5.2)
- camera-based tracking and localization [1,4]
- Presentation at ICPR 2020/21 :Poster
- Supplementary video:
https://youtu.be/tiPABhZoFEw
Download: 7 sets (day01 .. day07)
- Video data
- 4 synchronized video streams, 1824x1536, mjpeg format
- camera calibration
- Localization data
- vehicle localization from GNSS-RTK
- heading, speed, acceleration from in-vehicle measurements
- camera-based localization
day01: 3 lane merges
video calibration
localization_GNSS-RTK

day02: 12 lane merges
video calibration
localization_GNSS-RTK

day03: 4 lane merges
video calibration
localization_GNSS-RTK





VLMV Paper:
[1] K. Cordes and H. Broszio: "Vehicle Lane Merge Visual Benchmark", International Conference on Pattern Recognition (ICPR), IEEE, Jan. 2021, Paper at ieeexplore
Additional References:
[2] 5GCAR final demonstration (Video)
[3] O. Nassef, L. Sequeira, E. Salam, & T. Mahmoodi: "Building a Lane Merge Coordination for Connected Vehicles Using Deep Reinforcement Learning" , IEEE Internet of Things Journal, 2020
[4] K. Cordes, N.Nolte, N. Meine, and H. Broszio: "Accuracy Evaluation of Camera-based Vehicle Localization", International Conference on Connected Vehicles and Expo (ICCVE), IEEE, pp. 1-7, Nov. 2019, paper at ieeexplore
[5] K. Cordes and H. Broszio: "Constrained Multi Camera Calibration for Lane Merge Observation", International Conference on Computer Vision Theory and Applications (VISAPP), SciTePress, pp. 529-536, Feb. 2019, paper preprint (pdf)
[6] K. Cordes, H. Broszio, H Wymeersch, S Saur, F Wen, Nil Garcia, Hyowon Kim: "Radio‐Based Positioning and Video‐Based Positioning",
https://doi.org/10.1002/9781119692676.ch8, "Cellular V2X for Connected Automated Driving", Wiley, April 2021, Book Chapter at ieeexplore



